 пн-пт 09.00 - 18.00 (МСК)
пн-пт 09.00 - 18.00 (МСК)

Нахождение связных областей на изображениях
НАХОЖДЕНИЕ СВЯЗНЫХ ОБЛАСТЕЙ НА ИЗОБРАЖЕНИЯХ
Введение
При работе с изображениями, при анализе их содержимого нередко возникают задачи выделения на исходных изображениях непрерывных участков с близкими по некоторым свойствам наборами точек.
В этой статье мы осуществим небольшое исследование уже готовых способов нахождения связанных участков (областей), а так же изучим дополненный и улучшенный алгоритм роста регионов.
Основные понятия
Связанная область (участок) – набор точек на изображении, в котором любые две точки соединены друг с другом через последовательность соседей.
Виды связности:
- 4-связность - соседями точки считаются точки, имеющие с данной точкой одну общую сторону.

Рис 1.«4-связность»
Где С – сосед, Т – текущая (данная) точка.
- 8-связность – соседями точки считаются точки, имеющие с данной точкой общую сторону или общий угол.

Рис 2. «8-связность»
Где С – сосед, Т – текущая (данная) точка.
Бинарные изображения
Несмотря на то, что целевыми изображениями данной статьи являются цветные и полутоновые, все-таки стоит изучить так же и упрощенные - черно-белые (бинарные), поскольку к ним сходятся некоторые задачи анализа цветных изображений.
Допустим, мы имеем черно-белое изображение. Таковым будем называть изображение, состоящее из точек только двух цветов: цвета фона и цвета объектов. Чаще всего обозначают 0 – фоновый цвет, 1 – цвет объекта. В таком случае выделенные области всегда будут одинаковыми при неизменном типе связности (4- или 8- связном). В основном используют два алгоритма выделения областей: рекурсивный и циклический (итеративный).
Рекурсивный алгоритм:

Минусами данного алгоритма являются низкая скорость работы и высокий потребляемый объем памяти. Другой подход – циклический или итеративный, в литературе часто именуется «алгоритм последовательного сканирования». Его тоже следует изучить.
Циклический алгоритм:
Обход по изображению выполняется из верхнего левого угла. На внешнем цикле – перебор строк, на внутреннем – перебор столбцов строки. Точки с цветом фона опускаем. Нетрудно заметить, что при таком подходе всегда уже обработаны соседи сверху и слева.

После обхода всего изображения, следует его повторить и осуществить повторное выделение областей, учитывающее эквивалентности областей.
Цветные и серые изображения
Множество простых методов реализует такое решение: многоцветное изображение конвертируется в двухцветное изображение простыми способами. При этом рассматриваются цвет или яркость точек. После преобразования к изображению применяются рассмотренные выше, либо аналогичные алгоритмы.
Методы, которые используют определенные пользователем параметры (порог яркости, пороги группировки цвета) являются плохими из-за слабой гибкости. Если меняется яркость/контраст/цветовой баланс, то все параметры приходится переопределять, причем вручную. Намного более применимы алгоритмы, изменяющие эти параметры в зависимости от статистики анализируемого изображения. Они намного более независимы от применения разных корректировок окраски.
Алгоритм k-средних
В общем виде его псевдокод выглядит так:
Исходные данные:
- Множество цветовXi, i = 1..K (для каждой из точек);
- N – Количество групп, на которые алгоритм поделит множество.
Результат:
- N усредненных цветов точек Mj, j = 1..N (средний цвет каждой из групп);
- отнесение каждой из точек Xi в какую-либо из N групп.
Ход решения:
- Случайным образом выбрать N средних цветов групп Mj, j = 1..N.
- Составить таблицу расстояний от цвета каждой точки Xi до каждого среднего цвета групп Mj. Каждую из точек Xi отнести к какой-либо группе по критерию минимума расстояния до цвета Mj этой группы.
- Пересчитать средние цвета Mj всех групп.
- Повторять шаги 2, 3 пока цвета групп не установятся в неизменяющееся значение.
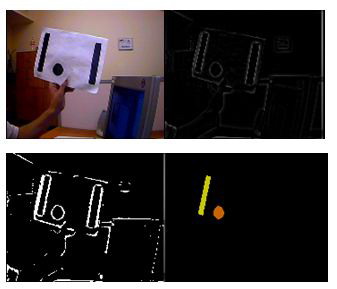
Допустим, мы применяем этот метод к одномерному набору точек, и количество групп выбираем равное 2. После окончания работы алгоритма точки одной из групп закрашиваем белым, другой – черным. Таким образом, мы выполняем этот алгоритм для нахождения светлых объектов на темном фоне, либо наоборот. На примере ниже – темные объекты в естественном окружении.
Основные преимущества такого метода – высокая скорость и несложная реализация. Но не всегда он приводит нас к хорошему решению: в данном примере одна из черных полос в ходе алгоритма превратилась в фон.

Оставшиеся алгоритмы на нахождения связанных областей условно разделяют на два множества:
- Анализирующие перепады яркости.
- Осуществляющие прямой поиск областей.
Алгоритмы, анализирующие перепады яркости (границы).
Это множество методов осуществляет поиск областей по границам – областям с высокими перепадами яркости на изображении. Порядок работы для них всех схож:
- Выделение областей с большими перепадами яркости («границ»).
- Поиск областей по выделенным границам.
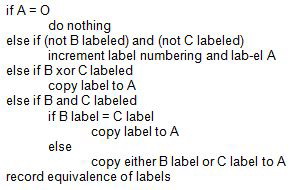
Теперь повторим поиск решения той же задачи, что и в предыдущем случае (черные объекты в естественном окружении), но уже с использованием новых алгоритмов.
Выше приведены изображения, показывающие работу одного из методов на основе анализа границ. С помощью фильтра осуществляется поиск зон с перепадами яркости. Производится бинаризация (алгоритмом k-средних). Поиск связанных областей осуществляется методом последовательного сканирования.
Эта задача отлично подходит для описания плюсов и минусов такого способа. Он намного более гибкий, нежели обычное преобразование изображения к черно-белому, поскольку мы имеем возможность регулирования чувствительности метода (меняя настройки фильтра). Метод практически независим от изменения параметров изображения (контраст, яркость, шумы и т.д.), поскольку использует не конкретные значения цвета точек, а перепады (высокие частоты).
Но есть и минусы:
- Низкая устойчивость: маленький разрыв границ способен привести нас к несрабатыванию алгоритма. Анализируя результат с помощью методов математической морфологии, мы можем сгладить ошибку, но при этом начинает играть роль второй минус.
- Низкая точность. Граница может занимать большую долю описываемого ею объекта, но при этом ее пространство может быть отнесено к фону.
- Низкая скорость работы – каждый из трёх этапом является медленным, суммарное время работы очень высоко.
Часть этих недостатков возникают из-за разбиения метода на этапы, ведь на каждом из них производится отброс лишней информации, но из-за неточностей каждого из них отбрасывается так же и полезная информация – возникает ошибка. По ходу работы эта ошибка накапливается и к концу алгоритма достигает значительного размера.
Методы, основанные на прямом поиске областей.
Это множество методов пробует выделить области непосредственно, а не косвенным путем, как предыдущие.
Пусть:
- A - изображение, (i, j) - координаты в A. A и пара (i, j) образуют множество наборов (A, i, j).
- f(A, i, j) > Rn - функция, которая переводит изображение A и координаты (i, j) в новое пространство Rn.
- x &isin Rn – элемент из Rn, а |v| - его размер (модуль).
- C – класс значений набора (A, i, j), аg(C) > Rn - функция, отображающая его в Rn.
- v1 = g(C), v2 = f(A, i, j), F(v1 - v2) - мера близости класса C и вектора (A, i, j).
Таким образом, С задает некую область в изображении A.
Предположим, что мы уже выделили некий класс С на изображении. В таком случае мы можем добавлять к нему соседние элементы, для которых функция L(f(A, i, j) - g(C))–мера расстояния - меньше выбранного порога.
Рассмотрим упрощенный случай – выделение по яркости:
- f(A, i, j) – яркость в точке i, j.
- g(C) - усредненная яркость точек класса.
- L(B) - есть модуль яркости (так как в данном случае пространство Rn получается одномерным).
В таком случае точку мы заносим в класс в том случае, когда ее яркость отличается от усредненной яркости по точкам этого класса на величину, меньшую порога. Такой набор заданных нами функций довольно хорошо применим, но в общем случае можно получить еще более хорошие результаты.
Если мы выберем более сложные пространства в качестве параметров алгоритма, например набор статистических параметров точки (разницу каждой из RGB-компонент по сравнению с соседями, дисперсию яркостей точки и соседей и т.п.). Кроме того, можно выбрать функцию модуля отличную от стандартной функции.
Уже существует алгоритм для простого случая разделения по яркости – алгоритм роста регионов (regiongrowing). Он, в принципе, несильно отличается от метода выделения областей обычного черно-белого изображения, но его легко можно обобщить на случай других функций f, g, Rn. Но важным минусом этого алгоритма является низкая скорость работы и огромное потребление памяти, порой приводящее к полному ее заполнению. Эта проблема решается итеративным обобщенным алгоритмом.
Начало алгоритма все также из верхнего левого угла:
- Объявляем левый верхний пиксель изображения новым классом.
- Q–порог разницы яркости между классами.
- Рассматривая точки первого ряда, мы считаем отклонение от точки пикселя слева и, в зависимости от результата сравнения с порогом Q, либо заводим новый класс, либо заносим эту точку в класс соседа слева.
- В каждом следующем ряду первый пиксель сравниваем с пикселем сверху (аналогично предыдущему пункту).
- Для всех пикселей НЕ с первого ряда и НЕ с первого столбца – сравниваем с двумя пикселями, которые сверху и слева, вычисляем 2 отклонения L1 и L2 - от классов верхнего и левого пикселей соответственно.
- Если оба отклонения больше порога – заводим новый класс.
- Если одно из отклонений больше порога, а другое меньше – заносим эту точку в класс с отклонением, меньшим порога.
- Если отклонение допустимо для обоих классов:
- Если отклонение между этими классами меньше порога, то объединяем классы, и заносим точку в полученный класс.
- Если отклонение между этими классами больше порога, то мы заносим точку в класс, отклонение от которого меньше.
Этот метод позволяет использовать различные отображения f, g, L и пространства, но при этом относительно них он равнозначен. Нетрудно увидеть, что метод рассматривает четырехсвязные области.
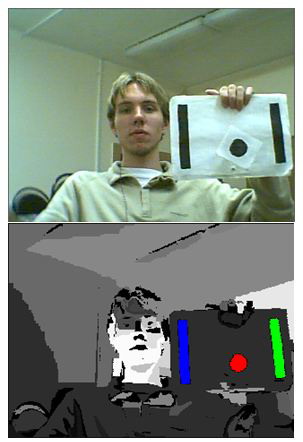
Рис 3. В качестве пороговой яркости выбрана яркость 50 (при диапазоне 0..255)
Плюсы такого алгоритма:
- Большой простор применения, поскольку можно выбирать самые различные отображения и пространства.
- Высокая скорость.
- Низкий потребляемый объем памяти.
- Высокоточная результативность.
- Изменением порога можно менять чувствительность метода.
В этом разделе стоит так же рассмотреть и другие методы, основанные на прямом поиске областей.
Слияние регионов (Region Merging):
Делим изображение на области по некоторому критерию. Затем начинаем постепенно сливать области, обладающие достаточной степенью схожести до тех пор, пока между всеми областями не будет низкая степень схожести. Его сложность в выборе первоначального разбиения и выборе критерия схожести.
Разбиение и слияние регионов (Region splitting & merging):
Разбиваем, как и в предыдущем случае, все изображение на области. Далее все разнородные области делим на однородные. Потом, как и в методе слияния регионов, начинаем сливать все области, но только в случае, если после этого сохраняется однородность полученной области. Его сложность наследует сложность предыдущего способа, добавляя проблему выбора критерия однородности.
Метод "водораздела" (Watershed Segmentation):
Работает только с полутоновыми изображениями. Все изображение представляется некоторой географической поверхностью – яркость каждой точки характеризует высоту ландшафта. После этого находятся области стабильных минимумов и области стабильных максимумов.
Источник: http://cgm.computergraphics.ru